
Photogrammetry
Photogrammetry is the science of determining 3D measurements from photography, normally by using aerial photography. One of the outputs from this is an Orthophoto, which is a ‘corrected’ 2D map to a uniform scale, without distortion that can be used for measurements in 2D.
Photogrammetry also produces 3D information in the form of elevations on maps. This was traditionally carried out with stereoplotters, however this has all but been replaced with 3D Photogrammetry Mapping software, such as Pix4D or Agisoft or DroneDeploy or others. The principle however, remains the same – they are based on determining the position of a point in multiple images. The images normally have significant overlap, often between 60% and 80% to provide the necessary accuracy.
The software plans an autonomous flight based on height, area, ground sampling distance (GSD) required, usually measured in cm/pixel and takes numerous photographs to generate the 2D orthomosaic and the 3D model.
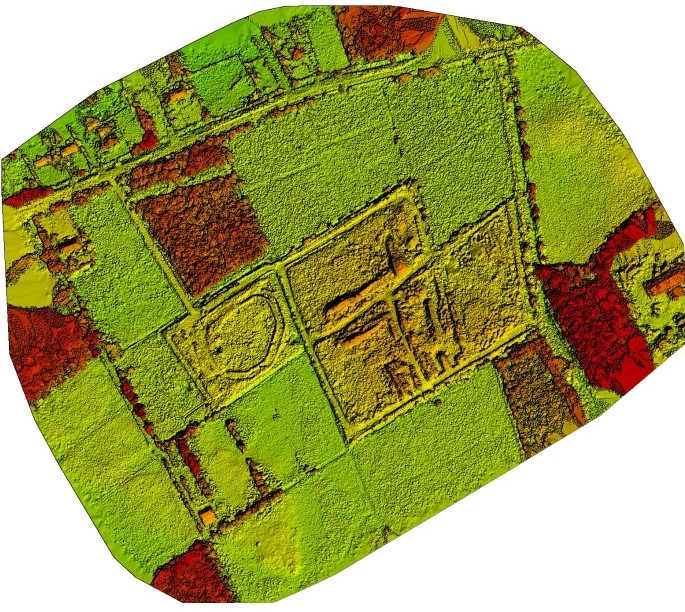
Sample Orthomosaic over – Flown at 30m height and GSD 0.75cm/px.
Drones / Quadcopters
Modern drones / quadcopters all rely on the general principles of flight;
-
- Weight
- Lift
- Drag
- Thrust
On a quadcopter, two opposite propellers rotate clockwise and the other two opposite propellers rotate anti-clockwise – this provides stability to the drone. The propellers are very similar to aircraft propellers and are designed using basic aerodynamics principles to provide the most efficient lift for the particular drone. Flight is controlled through the speed of rotation of the each of the individual propellers (by way of individual propeller motors) and drones generally contain the following main components;
-
-
- A GPS Module – this accurately locates the exact position of the drone (most drones use WGS84 coordinate system). Some drones use both GPS and GLONASS satellites for added redundancy and more accurate positioning.
-
-
-
- Electronic Speed Controllers (ESCs) – these regulate the speed of the propellers
-
-
-
- An Inertial Measurement Unit (IMU) – this uses accelerometers and gyroscope(s) to determine the status of the drone and determine its current position. This information is fed into the Flight Controller to stabilise and fly the drone.
-
-
-
- Obstacle avoidance sensors – Many drones have vision sensors to avoid obstacles in flight subject to manufacturers limitations etc.
-
-
-
- Flight Controller – this is the central part of any drone and takes information from all other components and the remote controller to enable the drone to fly and provide stability. It processes hundreds of pieces of information every second to make possible easy flight and provide stability.
-
-
-
- Camera – Most drones have in-built cameras while others have detachable cameras that can be used for standard photography and videography, thermal imaging, or multispectral imaging.
-

Sample Project Outputs
Surveying Principles
Topographical Surveying – Accuracy
The first question to consider with any project is, what accuracy is required. Is Relative or Global accuracy required.
Relative Accuracy
Relative accuracy is in relation to the specific project relative to that specific area but not referenced to a wider coordinate system. Global accuracy however, is referenced to a wider coordinate system such as WGS84 or ‘IRENET95’ ITM (Irish Transverse Mercator) also known as EPSG ‘European Petroleum Survey Group‘ :2157.
Relative accuracy can be provided by just a Total Station when using traditional methods or by a drone without ground control points. All points in the survey are relative to each other and can be assessed to an arbitrary height elevation. This may be suitable for small projects, single houses, small developments etc.
A Total Station requires a ‘line of sight’ to the target but can provide very accurate measurements. It can be as accurate as 5mm or better under the right conditions etc. Sometimes a GPS Rover is easier (and faster) to capture topographical features where a line of sight to Satellites is easier.
Global Accuracy
Global accuracy will position a point in a known coordinate system, either locally (eg. relative to Ireland) or to a world recognised system of eastings and northings (e.g. WGS84). A GPS Rover will provide Global accuracy and can be related to a recognised coordinate system, e.g. IRENET95 (EPSG:2157) for Ireland. Almost all drones are GPS referenced to WGS84 (latitude and longitude) and for Ireland these are converted to EPSG:2157, which is the coordinate system currently most used in Ireland.
If Global accuracy is required when drone surveying, this can be provided generally 3 ways;
-
-
- With GCPs (Ground Control Points) which are surveyed in advance and have known coordinates and elevations, for which to reference the photography and to input into the photogrammetry software. Usually between 5GCPs and 8 GCPs are required for a typical 20Acre – 30Acre site.
-
-
-
- With RTK (Real Time Kinematics) where the signal from the Satellite is received by the drone and a base station that applies a correction factor to the drone in real time. This provides accuracy in real time but does require a good continuous link between the drone and the base station. However it is seldom a project requirement to provide real time data.
-
-
-
- With PPK (Post Processing Kinematics) where the signal from the Satellite is received by the drone and the base station and processed at a later stage when the information is downloaded. This method generally provides more accuracy as it is not reliant on a continuous link to the base station.
-
Where drone technology is not suitable, more traditional methods are employed;
-
-
-
- Total Station – Using a total station, one can expect the accuracy horizontal and vertical to be in the region of 5mm. This however is dependent on the site in question and many other conditions. It is possible to achieve greater accuracy under certain conditions when required.
-
-
-
-
-
- GPS – Global Positioning Systems rely on, the time it takes for a signal to be received from multiple Satellites to a GPS receiver in a instrument (eg. GPS Rover) to accurately locate its position. A minimum of 4 satellites are required for an position location and a clear line of sight is also required to the Satellite. GPS systems generally provide an accuracy of 20mm – 30mm.
-
-
Video – Sample Pix4D model – 5min flight time at 30m altitude (AGL), taking 99 images (10Mb each) and processing in Pix4D. Produced in 12 hours.